Warning!
Before using the Control Point VAV panel with the VAV14-IP controller, make sure to upgrade its firmware to version V2.5.
Instructions how to upgrade firmware: iSMA Configurator.
Balancing Steps
To perform the balancing process and regulate the efficiency point of the ventilation system, follow the below steps. These activities are to performed in the presented order. If required, perform the balancing process with zeroing, however, according to the specific user and accuracy requirements, it is possible to omit the pressure sensor zeroing and/or minimum airflow calibration.
Balancing with zeroing
-
Pressure sensor zeroing.
-
Set the factory K-factor.
-
Measure the airflow and enter the value in the designated field.
-
Perform the maximum airflow calibration.
-
Measure the airflow and enter the value in the designated field.
-
Perform the minimum airflow calibration.
Balancing based on the maximum and minimum airflow calibration
-
Set the factory K-factor.
-
Measure the airflow and enter the value in the designated field.
-
Perform the maximum airflow calibration.
-
Measure the airflow and enter the value in the designated field.
-
Perform the minimum airflow calibration.
Balancing based on the maximum airflow calibration
-
Set the factory K-factor.
-
Measure the airflow and enter the value in the designated field.
-
Perform the maximum airflow calibration.
Therefore, in the Control Point VAV submenu, it is possible to skip the ZERO action under PRES and/or MINF action under FCAL.
KFAC
KFAC: sets the K-factor value to the airflow calculations;
-
K-Factor:
-
Modbus register: 40289;
-
BACnet object: AV61, property: Present Value;
-
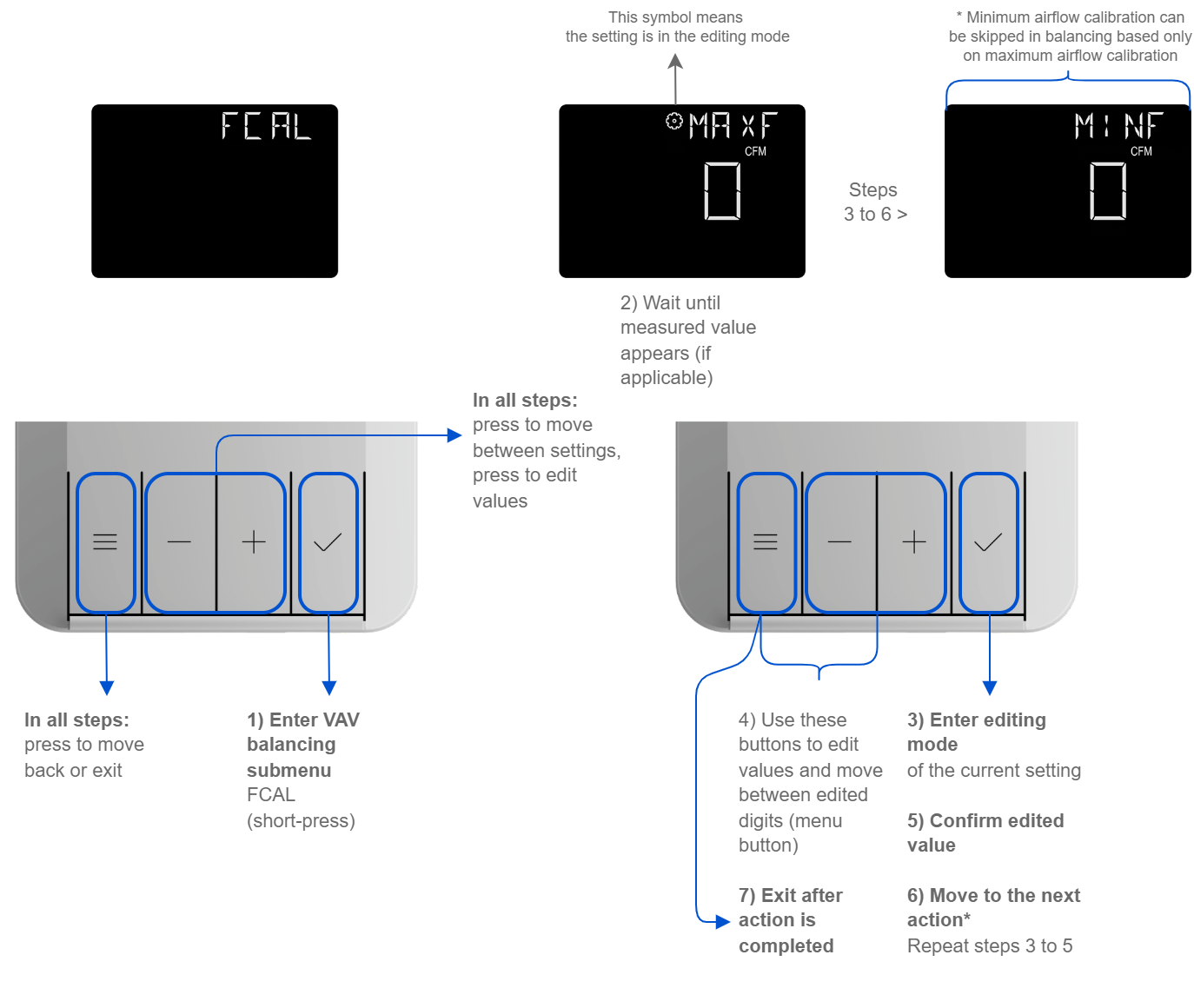
FCAL
FCAL: executes a calibration action according to a new maximum and/or minimum airflow value(s);
-
ActualAirflow:
-
Modbus register: 30012;
-
BACnet object: AI11, property: Present Value;
-
Note
If performing the balancing process based on the maximum airflow calibration, it is possible to skip the MINF action here.
|
Actions |
|
|---|---|
|
MAXF |
Performs a calibration action according to a new maximum airflow value |
|
MINF (optional) |
Performs a calibration action according to a new minimum airflow value |
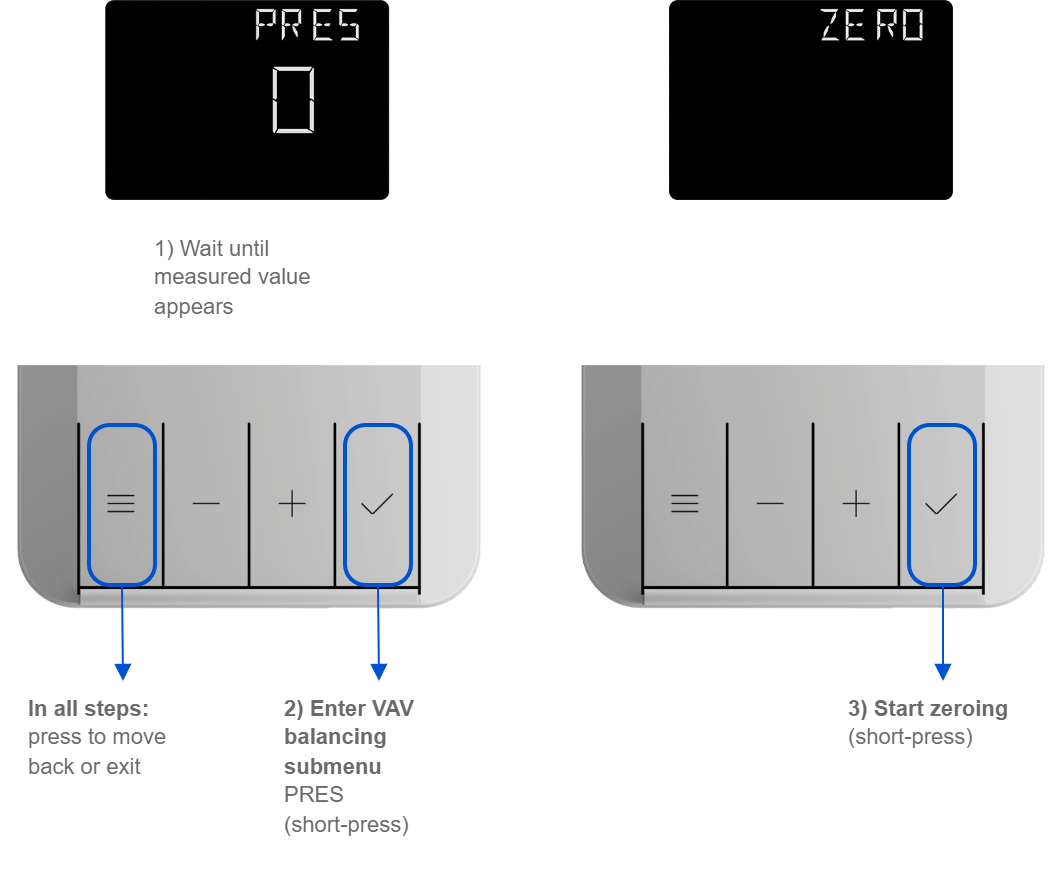
PRES
PRES: allows to set a differential pressure (initially displayed value measured by the VAV);
-
DifferentialPressure:
-
Modbus register: 30016;
-
BACnet object: AI15, property: Present Value;
-
Note
If performing the balancing process based on the maximum and/or minimum airflow calibration, it is possible to skip the ZERO action here.
|
Action |
|
|---|---|
|
ZERO:
|
Performs the pressure sensor zeroing action |
MODE
DAMP: allows to force an operating mode to a damper;
-
DamperCommand:
-
Modbus register: 40268;
-
BACnet object: MSV7, property: Present Value;
-
|
Damper mode |
Action |
|---|---|
|
AUTO |
Set auto mode (VAV application logic takes control) |
|
MAXF |
Go to a maximum airflow |
|
MINF |
Go to a minimum airflow |
|
USRF |
Go to a user-set airflow |
|
USRP |
Go to a user-set position (% of damper opening) |
|
OPEN |
Damper fully open |
|
CLOS |
Damper fully closed |
|
CLBR |
Performs a damper calibration (the damper goes to 100%, then to 0%, and goes back to the control loop output) |
-
UserSetPosition: user-set opening level (after selecting the USRF opting in the VAV_DAMPER_COMMAND variable);
-
Modbus register: 40292;
-
BACnet object: AV64, property: Present Value;
-
-
UserSetAirflow: user-set airflow setpoint (after selecting the USRP opting in the VAV_DAMPER_COMMAND variable);
-
Modbus register: 40293;
-
BACnet object: AV65, property: Present Value;
-
-
AirflowCalibration: allows to enter the airflow value measured by the hood for calibration;
-
Modbus register: 40294;
-
BACnet object: AV66, property: Present Value;
-
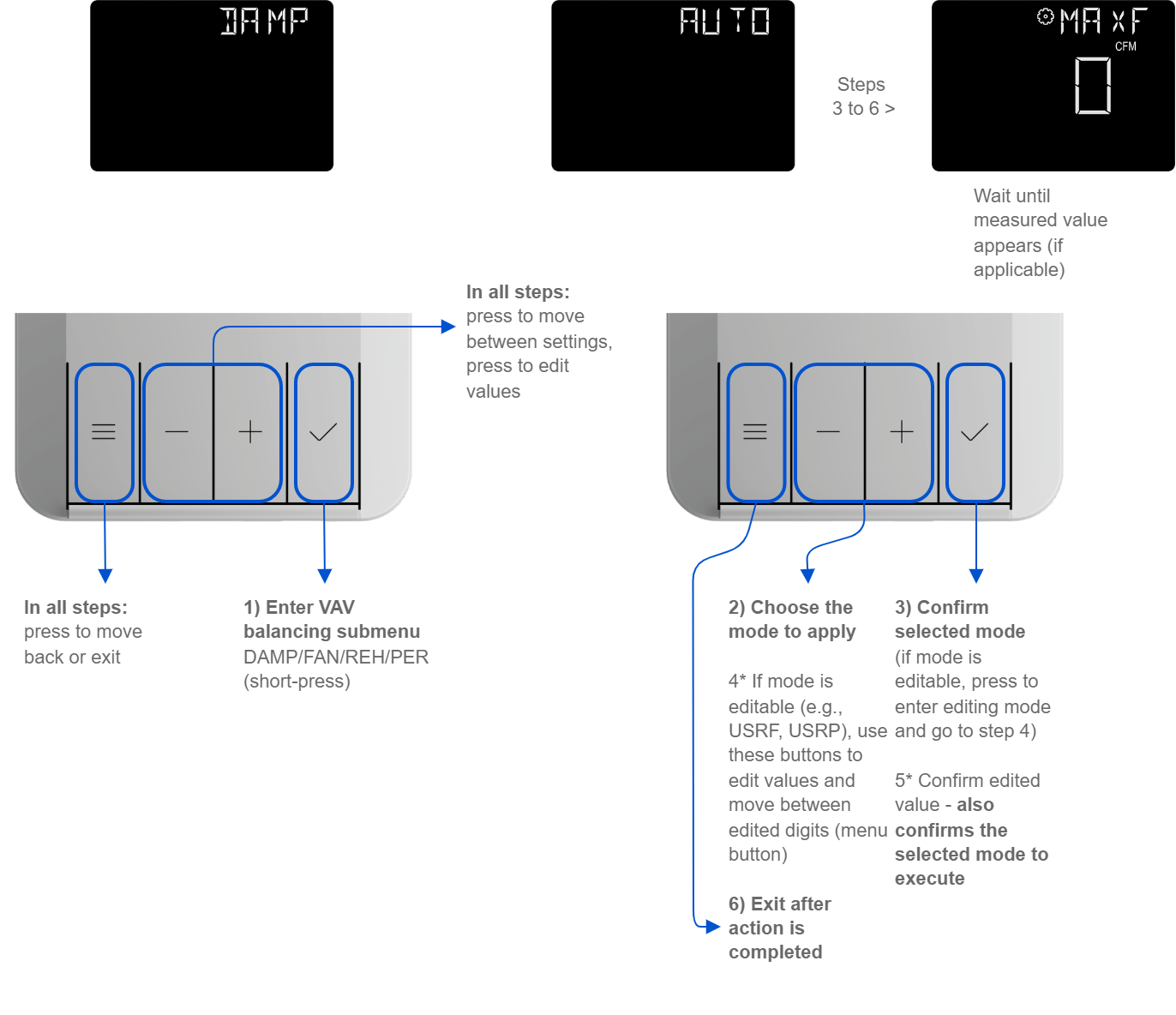
FAN: allows to force an operating mode to a fan;
-
FanCommand:
-
Modbus register: 40269;
-
BACnet object: MSV8, property: Present Value;
-
|
Fan mode |
Action |
|---|---|
|
AUTO |
Set an auto mode (VAV application logic takes control) |
|
MAXS |
Set a maximum fan speed |
|
MINS |
Set a minimum fan speed |
|
STOP |
Stop fan |
REH: allows to force an operating mode to a reheater;
-
ReheaterCommand:
-
Modbus register: 40270;
-
BACnet object: MSV9, property: Present Value;
-
|
Reheater mode |
Action |
|---|---|
|
AUTO |
Set an auto mode (VAV application logic takes control) |
|
OPEN |
Fully open |
|
CLOS |
Fully closed |
PER: allows to force an operating mode to a perimeter;
-
PerimeterCommand:
-
Modbus register: 40271;
-
BACnet object: MSV10, property: Present Value.
-
|
Perimeter mode |
Action |
|---|---|
|
AUTO |
Set an auto mode (VAV application logic takes control) |
|
OPEN |
Fully open |
|
CLOS |
Fully closed |