The LoopPoint component implements a simple PID control loop. Loop objects provide closed-loop PID control (proportional, integral, derivative) at the controller level. Independent gain constants allow the loop to be configured as P-only, PI, or PID.
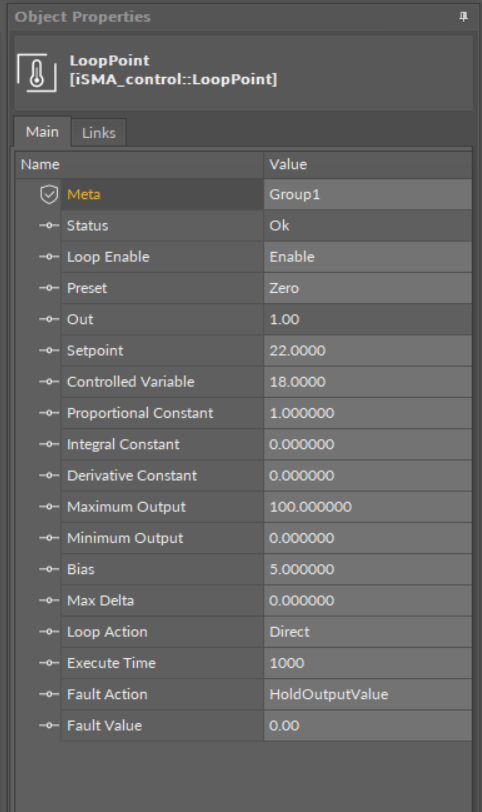
LoopPoint component
Slots
The LoopPoint component has the following slots:
-
Loop Enable: setting this input to true will enable the PID loop algorithm to execute at the rate selected by the Execute Time property. Setting this input to false will force the PID loop output to a value dependent on the selection in the Preset property.
-
Preset: if the component is switched from enabled to disabled, the Out value is determined according to the function selected in the Preset slot:
-
Max: sets the loop output value to the Maximum Output property value.
-
Min: sets the loop output value to the Minimum Output property value.
-
Zero: sets the loop output value to a zero (0.0) value.
-
-
Out: the result of the loop algorithm.
-
Setpoint: input for the Setpoint value (for example, space temperature Setpoint). This input must be valid for this object to function.
-
Controlled Variable: input for the controlled parameter (for example, space temperature). This input must be valid for this object to function.
-
Proportional Constant: defines the value of the proportional gain parameter used by the loop algorithm. Used to set the overall gain for the loop. A starting point for this value is found by output range/throttling range.
-
Integral Constant: defines the integral gain parameter, in repeats per minute, used by the loop algorithm. Also, called reset rate. Acts on the magnitude of the Setpoint error. A typical starting point is 0.5.
-
Derivative Constant: defines the derivative gain parameter, in seconds, used by the loop algorithm. Acts on the rate of change of the Setpoint error.
-
Maximum Output: defines the maximum output value that the loop algorithm can produce.
-
Minimum Output: defines the minimum output value that the loop algorithm can produce.
-
Bias: defines the amount of the output bias added to the output to correct offset error, normally used only with proportional control.
-
Max Delta: defines the max amount the Out value can change in one period set in the Execute Time slot. Setting to 0 disables this function.
-
Loop Action: determines whether the control algorithm is direct or reverse acting. Loops setup for direct acting mode increases the loop output as the value of the controlled variable becomes greater than the Setpoint value. In a temperature loop, this is typically considered to be a cooling application. Loops setup for reverse acting mode increases the loop output as the value of the controlled variable becomes less than the Setpoint value. In a temperature loop, this is typically considered to be a heating application.
-
Execute Time: controls the execution frequency for the PID algorithm, where the default value is 1 second.
-
Fault Action: defines an action to be invoked once a component goes into the Fault status:
-
HoldOutputValue: upholds a last known Out value (from when the status was OK) for the time when the Fault status lasts;
-
OutputValueOnFault: the Out value is set to the FaultValue for the time when the Fault status lasts;
-
MinimumOutputValue: the Out value is set to the MinimumOutput slot value for the time when the Fault status lasts;
-
MaximumOutputValue: the Out value is set to the MaximumOutput slot value for the time when the Fault status lasts;.
-
-
Fault Value: a value set to the Out slot if the Fault Action is set to the OutputValueOnFault option; must be within limits of the Minimum Output and Maximum Output slots.