Applicable to OS V1.7
The RotaryActuator component is an IO point (network point class) component that allows to control damper actuators. The component allows to transfer data received from the linked Data Point in order to control the damper actuator and allows to set the polling mode of the point. The component can pass data from the Data Point class component by linking Reference slots. The RotaryActuator component may be linked from an Analog Data Point.
In order to operate properly, the RotaryActuator component must be located under the Local IO component in the Networks container.
The RotaryActuator component has the following slots:
-
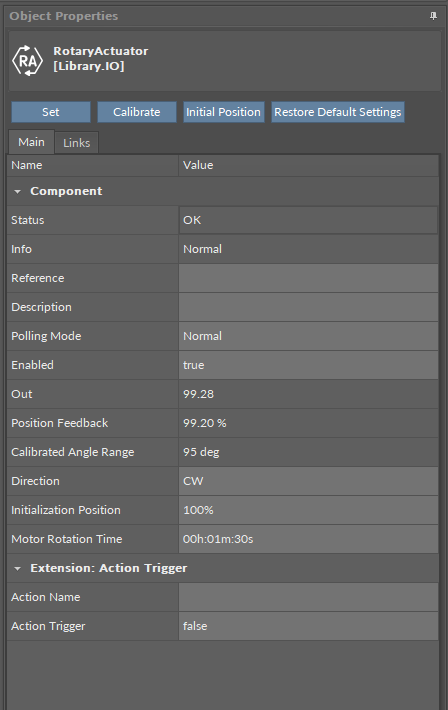
Status: indicates the current status of the component; if the component works properly, its status is OK. The component becomes Disabled, once the Enabled slot is in false;
-
Available information: Disabled, Fault, OK;
-
-
Info: provides a detailed information about a fault status of the component;
-
Available information:
-
Normal (status OK): the motor is in a normal state;
-
ManualOverride (status OK): the manual override button has been pressed on the device;
-
Calibrating (status OK): the motor is in a calibration process;
-
SettingPosition (status OK): the motor is in a setting position process;
-
Going to initial position (status OK): the motor is going to an initial position;
-
StuckAlarm (status OK): the VAV motor is mechanically blocked;
-
CalibrationAlarm (status OK): the calibration process has been invoked when the motor is blocked in both directions;
-
Low Voltage (status OK): the 24 V power supply is unplugged;
-
Driver Alarm (status OK): the motor driver is in a faulty condition such as over-current protection (OCP) or over-temperature protection (OTP);
-
Bad request (status Down): occurs when point could not be polled successfully, most likely because its parameters are incorrect (e.g., object ID outside of range);
-
Incorrect configuration (status Fault): occurs when a parameter is missing or wrongly configured (e.g., the Address slot is null) or when the component is added to a device which does not support this particular type of network point;
-
Device disabled (status Disabled): the Enabled slot in the LocalIO is set to false;
-
Point disabled (status Disabled): the Enabled slot in the component is set to false;
-
-
-
Reference: a special slot allowing to connect network point class components with Data Point class components. It allows to transfer the Out slot value along with the component's status.
Notes
Reference links from Data Points to network points also transfer values in the opposite direction, in a link-back-from process: having received a value by the Reference link, the network point transfers it back to the Data Point to whichever input priority from 1 to 16 is set in the network point.
The Reference links work on a change-of-value. If a value in the Data Point's Out slot changes, it is immediately transferred to a network point linked by the Reference link–such change is not dependent on an application cycle.
-
Description: an additional detailed information about a component that may be freely described by the user; the description may contain individual coding, defined in the user's system documentation, meter's or sensor's location, or any other information the user finds applicable.
-
Polling Mode: allows to set the frequency of sending polling requests for the point's value—by default, the polling mode is set to normal;
-
Available settings: fast, normal (default), slow;
-
-
Enabled: change of the slot's value enables or disables the component—if the component becomes disabled, it stops to transfer values to the damper actuator; by default, the component is enabled.
-
Available settings: true (enabled - default), false (disabled).
-
Note
If the Enabled slot is in false (meaning the component is disabled), the Status slot becomes Disabled.
-
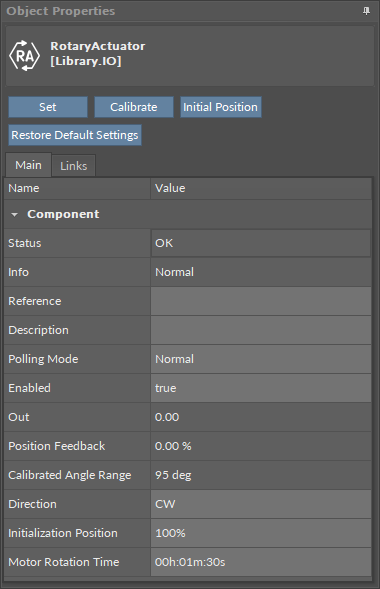
Out: displays a value transferred to the damper actuator;
Note
If the component's Status is fault (e.g., an invalid value in the Address slot), the Out value is null.
-
Position Feedback: shows current position of the motor;
-
Calibrated Angle Range: shows a calibration angle degree;
-
Available information:
-
0 – when not calibrated,
-
>0 – angle between limiters,
-
95 – calibration with default limiters;
-
-
-
Direction: allows to set the damper actuator's movement direction to 100% open position;
-
Available settings: CW (clockwise - default), CCW (counterclockwise);
-
-
Initialization Position: allows to set an initial position for the damper actuator (by default, 100%);
-
Motor Rotation Time: allows to set the time for a 90 degrees stroke of the motor (by default, 1 min 30 s).
The RotaryActuator component has the following actions:
-
Set: allows to set a specific position for the actuator to reach upon invoking the action;
-
Calibrate: allows to initialize the calibration process, in which the damper actuator goes to 100%, then to 0%, and goes back to the value set in the Out slot. This action is triggered after each restart of the VAV device, as long as it is not calibrated. It is also triggered after adding RA component onto the wire sheet.
-
Initial Position: sets the damper actuator in an initial position, which is defined in the Initialization Position slot; afterwards, sets the actuator to the value set in the Out slot. This action is triggered after each restart of VAV device, as long as it is calibrated. It is also triggered after releasing the clutch;
-
Restore Default Settings: sets default settings to the component.
ActionTrigger Extension
The ActionTrigger extension is designed to invoke any action that is available for the component. The extension triggers an action selected in the Action Name on the rising edge of the Action Trigger slot. If the action has parameters to set, the parameter is taken from a relevant slot automatically added to the extension (Analog Value/Binary Value/String Value).
It is possible to add more than one ActionTrigger extension to the component (for example, one for each action in the component).
The extension is added from the context menu of the component.
The ActionTrigger extension has the following slots:
-
Action Name: allows to select an action to invoke;
-
Action Trigger: triggers an action selected in the Action Name slot;
-
Action Analog Value/Action Binary Value/Action String Value: a slot added automatically to the extension if an action selected in the Action Name slot has any specific parameters to set (depending on the type of action and its parameters, the relevant type of value is matched).