
Loop
The Loop component allows to configure a signal control loop–it allows to adjust the output value in order to reach the setpoint value comparing it with the current input value (measurement). The output value is estimated based on a proportional-integral-derivative mechanism. The Loop component may be configured as P-only, PI, or PID.
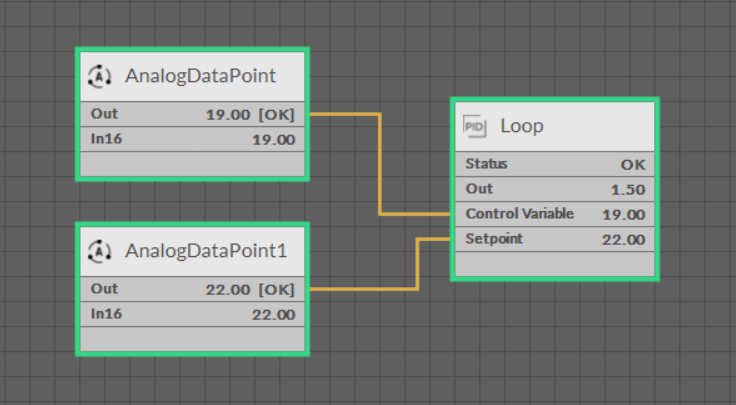
The Loop component
Slots
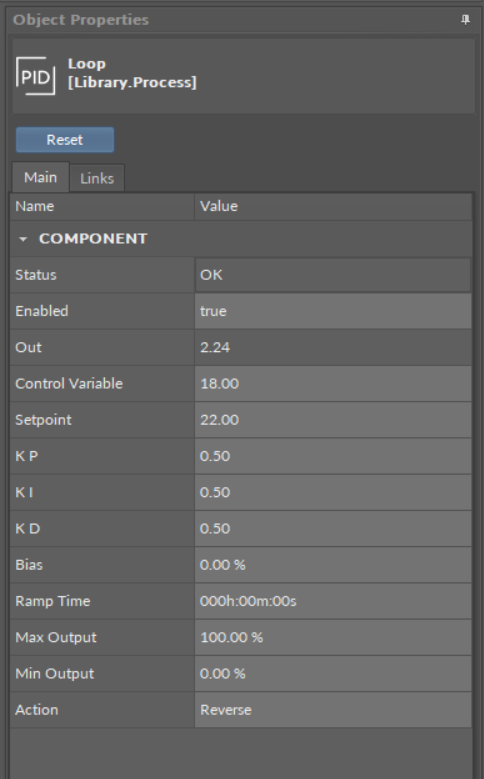
The Loop component has the following slots:
- Status: indicates the current status of the component (OK, Fault);
- Enabled: enables execution of the PID loop–if disabled, the Out slot is set to 0; if enabled, the component calculates the Out slot according to its regulation algorithm;
- Out: the result of the loop algorithm;
- Control Variable: the current, measured input value;
- Setpoint: the setpoint value;
- K P: defines a proportional gain of the loop algorithm–the value is a maximum difference between the setpoint and the current value, which results in the 100% output value;
- K I: defines an integral gain of the loop algorithm (expressed as 1/min);
- K D: defines a derivative gain of the loop algorithm (expressed as 1/min);
- Bias: defines the bias value added to the output;
- Ramp Time: defines the filtering time for the Out slot value;
- Max Output: allows to set a maximum limit on the Out slot value, by default set to 100;
- Min Output: allows to set a minimum limit on the Out slot value, by default set to 0;
- Action: allows to choose a Direct or Reverse operation mode of the component–the Direct mode reflects cooling/dehumidification process, and the Reverse mode reflects the heating/humidification process.
The Loop component slots
Action
The Loop component has the following action:
- Reset: brings the Out slot value back to Min Output value.