Special Application Modes for 4I4O-H, 4I4O-H-IP, 4U4O-H, and 4U4O-H-IP
The 4I4O-H, 4I4O-H-IP, 4U4O-H, 4U4O-H-IP modules have simple built-in applications, which can be used to control building devices. These applications control digital output states according to the signals from the digital input. The relation between inputs and outputs is shown in the table below, and it cannot be changed.
|
Digital Input |
Digital Output |
|---|---|
|
DI1 |
DO1 |
|
DI2 |
DO2 |
|
DI3 |
DO3 |
|
DI4 |
DO4 |
Built-in application determining relations between inputs and outputs
The digital inputs in 4I4O-H, 4I4O-H-IP, 4U4O-H, 4U4O-H-IP modules can be set to work in different modes. There are dedicated registers for operation mode (40176, 40180, 40184, 40188), time parameters (40177, 40181, 40185, 40189), setpoints for heating/cooling modes (40178, 40182, 40186, 40190 4U4O-H, and 4U4O-H-IP only), and for differential value in heating/cooling modes (40179, 40183, 40187, 40191 4U4O-H and 4U4O-H-IP only).
|
Register |
Description |
|---|---|
|
40176 |
DI1 OPERATION MODE |
|
40177 |
DI1 TIME VALUE |
|
40178 |
DI1 SETPOINT (4U4O-H and 4U4O-H-IP only) |
|
40179 |
DI1 DIFFERENTIAL (4U4O-H and 4U4O-H-IP only) |
|
40180 |
DI2 OPERATION MODE |
|
40181 |
DI2 TIME VALUE |
|
40182 |
DI2 SETPOINT (4U4O-H and 4U4O-H-IP only) |
|
40183 |
DI2 DIFFERENTIAL (4U4O-H and 4U4O-H-IP only) |
|
40184 |
DI3 OPERATION MODE |
|
40185 |
DI3 TIME VALUE |
|
40186 |
DI3 SETPOINT (4U4O-H and 4U4O-H-IP only) |
|
40187 |
DI3 DIFFERENTIAL (4U4O-H and 4U4O-H-IP only) |
|
40188 |
DI4 OPERATION MODE |
|
40189 |
DI4 TIME VALUE |
|
40190 |
DI4 SETPOINT (4U4O-H and 4U4O-H-IP only) |
|
40191 |
DI4 DIFFERENTIAL (4U4O-H and 4U4O-H-IP only) |
List of registers dedicated for special application mode
Operation Mode Registers (40176, 40180, 40184, and 40188)
This register contains information about the module working mode. Available modes and register values are listed in the table below:
|
Value |
OPERATION MODE Register |
|---|---|
|
0 |
Ordinary IO (def) |
|
1 |
Monostable Relay |
|
2 |
Bistable Relay |
|
3 |
Time Relay NO [ms] |
|
4 |
Time Relay NC [ms] |
|
5 |
Time Relay NO [s] |
|
6 |
Time Relay NC [s] |
|
7 |
Input Forwarding |
|
8 |
Heating (4U4O-H and 4U4O-H-IP only) |
|
9 |
Cooling (4U4O-H and 4U4O-H-IP only) |
Special application modes
The operating mode can be changed by writing the right value in the Operation Mode register.
Special modes are initialized after 3 seconds from the power-up or restart of the module (the time value needed to stabilize the operation of the analog transmitter).
With each change of the input mode, the assigned output is set to default state and the timer used in time-based modes is reset. If the recently selected operating mode is running, the output is controlled according to the new mode activated.
Ordinary IO
In this mode, the module operates as a standard IO; the inputs and the outputs are in no relation with each other.
Monostable Relay
In this mode, both the rising and the falling edge of the digital input change the output state. The action of a monostable relay can be executed remotely by changing the state of bit from false to true in the COMMAND register (40020). Outputs can by also overwritten with the DIGITAL OUTPUT register (40018), which allows remote control from BMS.
Bistable Relay
In this mode, only the rising edge of the digital input changes the output state. The action of a bistable relay can be executed remotely by changing the state of bit from false to true in the COMMAND register (40020). Outputs can be also overwritten by the DIGITAL OUTPUT register (40018 ), which allows remote control from BMS.
Time Relay NO [ms]
In this mode, if the output value is false, the rising edge of the digital input sets the output to a true value. Every falling edge of the digital input starts the counter from the beginning so that the output stays in a true value for the time defined in the TIME VALUE register (expressed in milliseconds), counting from the last falling edge of the digital input. The action of the time relay can be executed remotely by changing the state from false to true in the relevant COMMAND register (40020). The outputs can be also overwritten with the register of the DIGITAL OUTPUT module (40018), which allows for remote control from BMS.
Time Relay NC [ms]
In this mode, if the output value is false, the falling edge of the digital input sets the output to a true value. Every rising edge of the digital input starts the counter from the beginning so that the output stays in true value for a time defined in the TIME VALUE register (expressed in milliseconds), counting from the last rising edge of the digital input. The action of time relay can be executed remotely by changing the state from false to true in the relevant COMMAND register (40020). Outputs can be also overwritten with the register of DIGITAL OUTPUT module (40018), which allows for remote control from BMS.
Time Relay NO [s]
In this mode, if the output value is false, the rising edge of the digital input sets the output to a true value. Every falling edge on the digital input starts the counter from the beginning so that the output stays in true value for a time defined in TIME VALUE register (expressed in seconds), counting from the last falling edge of the digital input. The action of time relay can be executed remotely by changing the state from false to true in relevant COMMAND register (40020). Outputs can be also overwritten with the register of DIGITAL OUTPUT module (40018), which allows for remote control from BMS.
Time Relay NC [s]
In this mode, if the output value is false, the falling edge of the digital input sets the output to a true value. Every rising edge on the digital input starts the counter from the beginning so that the output stays in true value for a time defined in the TIME VALUE register (expressed in seconds), counting from the last rising edge of the digital input. The action of time relay can be executed remotely by changing state from false to true in the relevant COMMAND register (40020). Outputs can be also overwritten with the register of DIGITAL OUTPUT module (40018), which allows for remote control from BMS.
Input Forwarding
In this mode, any signal from the input is transferred directly to the assigned output without any modifications. The operation of the input forwarding mode can be stopped with the block input function.
Heating Mode (4U4O-H and 4U4O-H-IP Only)
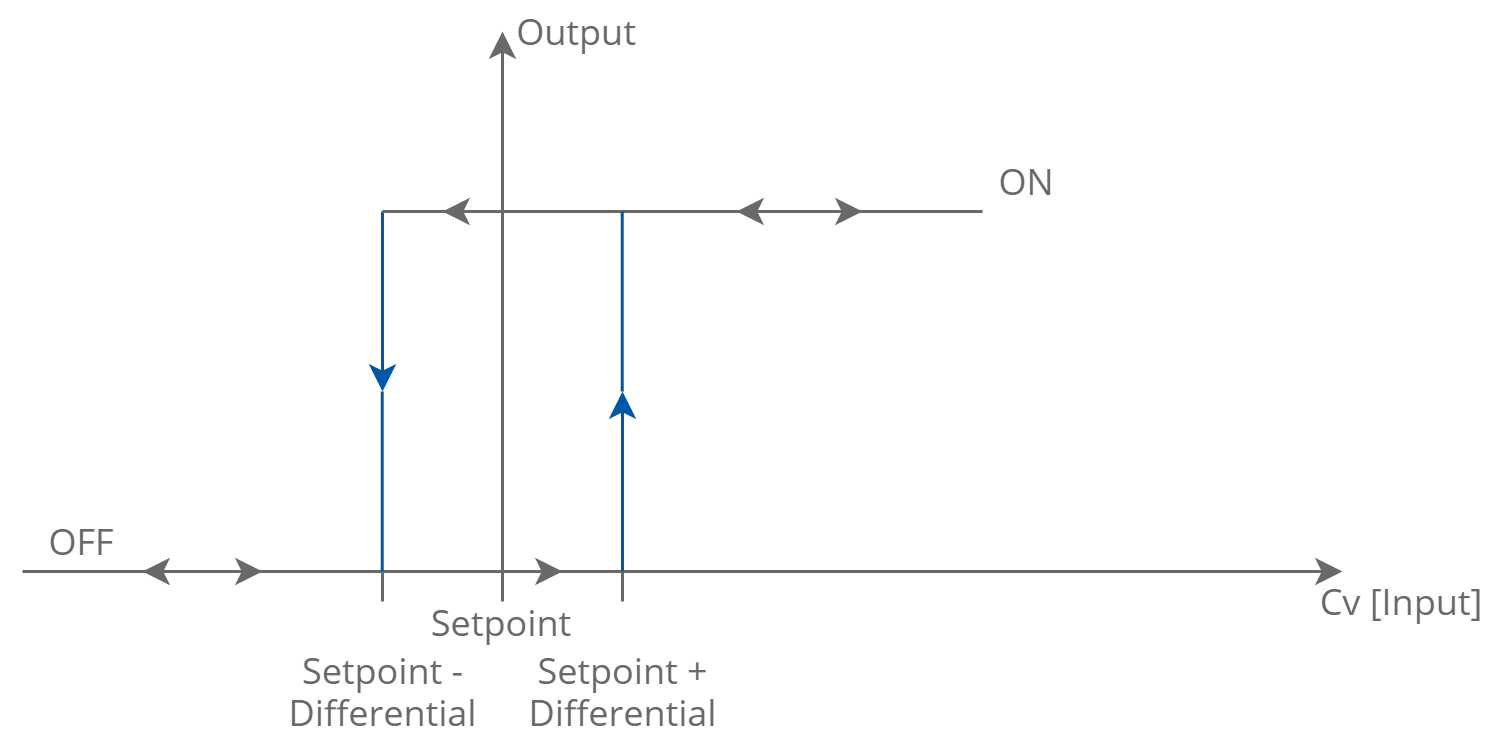
In this mode, the output is controlled like a typical thermostat, based on the Setpoint register and control value (input value) with differential parameter defined in the Differential register. The output signal works in 2 states, low and high.
If the control value is lower or equal with the difference between the Setpoint register and the Differential register, the output is in the low state.
If the control value is higher or equal with the sum of the Setpoint register and the Differential register, the output is in the high state.
Output in the high state:
Control value >= Setpoint + Differential
Output in the low state:
Control value <= Setpoint – Differential
The algorithm of the heating mode is shown in chart below.

The heating mode algorithm
WARNING!
In case when the temperature sensor fails (when it is disconnected or shortcut), the heating mode is not active and the output remains in the false state.
Cooling Mode (4U4O-H and 4U4O-H-IP Only)
In this mode, the output is controlled like a typical thermostat on the basis of the Setpoint register and the control value (input signal) with the differential parameter defined in the Differential register.
The output signal works in 2 states, low and high.
If the control value is lower or equal with the difference between the Setpoint register and the Differential register, the output is in the low state.
If the control value is higher or equal with the sum of the Setpoint register and Differential register, the output is in the high state.
Output in the low state:
Control value <= Setpoint – Differential
Output in the high state:
Control value >= Setpoint + Differential
The algorithm of the cooling mode is shown in the chart below.
The cooling mode algorithm
WARNING!
In case when the temperature sensor fails (if it is disconnected or shortcut), the heating mode does not work and the output remains in the false state.
Time Value Registers (40177,40181,40185,40189)
The registers contain time values for TIME RELAY modes. The time unit depends on the selected mode [milliseconds] or [seconds].
Command Register (40020)
The module is equipped with a special register called COMMAND (40020). The Command register is used to remotely execute the action (simulate light switch/PIR). The action is executed by changing the state of the relevant bit (changing from false to true). All special application modes can be executed except for Input Forwarding, Heating, and Cooling modes.
|
No. of Bit in the Register (40020) |
Command Input Number |
|---|---|
|
0 |
1 |
|
1 |
2 |
|
2 |
3 |
|
3 |
4 |
Command register for special application modes
Block Inputs Register (40021)
The Block Inputs register is used to block the physical input signals to take action in logic. By setting a true value on the relevant bit, the module blocks the input and no action will be executed. Setting false value restores normal operation. The block input function does not work when the heating/cooling input mode is set.
|
No. of Bit in the Register (40021) |
Block Input Number |
|---|---|
|
0 |
1 |
|
1 |
2 |
|
2 |
3 |
|
3 |
4 |
Block input register
Setpoint Registers (40178, 40182, 40186, 40190)
The Setpoint registers contain values which are used in heating/cooling modes (4U4O-H and 4U4O-H-IP only) as the setpoints for heating/cooling control algorithm
The default Setpoint value is 21.
The register stores the setpoint multiplied by 10.
Differential Registers (40179,40183,40187,40191)
The Differential registers contain values, which are used in heating/cooling modes (4U4O-H and 4U4O-H-IP only) as the differential for heating/cooling control algorithm. Setpoint registers and Differential registers create deadband of the control values, which has no influence on the output.
Deadband = (Setpoint – Differential, Setpoint + Differential)
The default Differential value is 1.
The register stores the differential multiplied by 10.